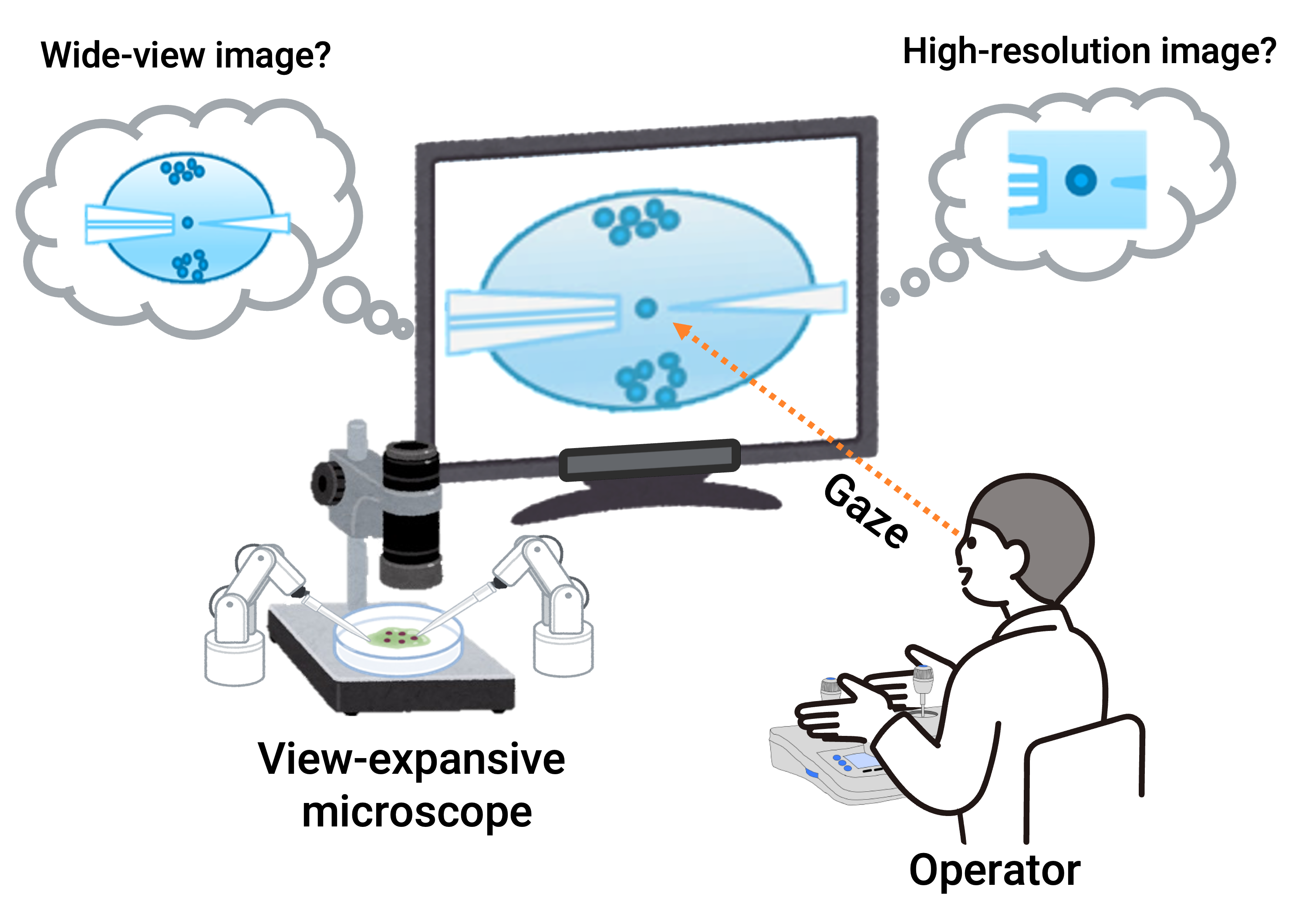
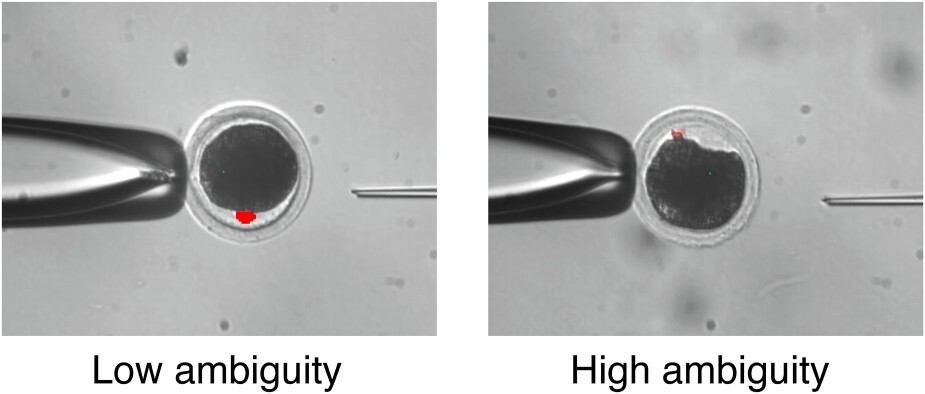
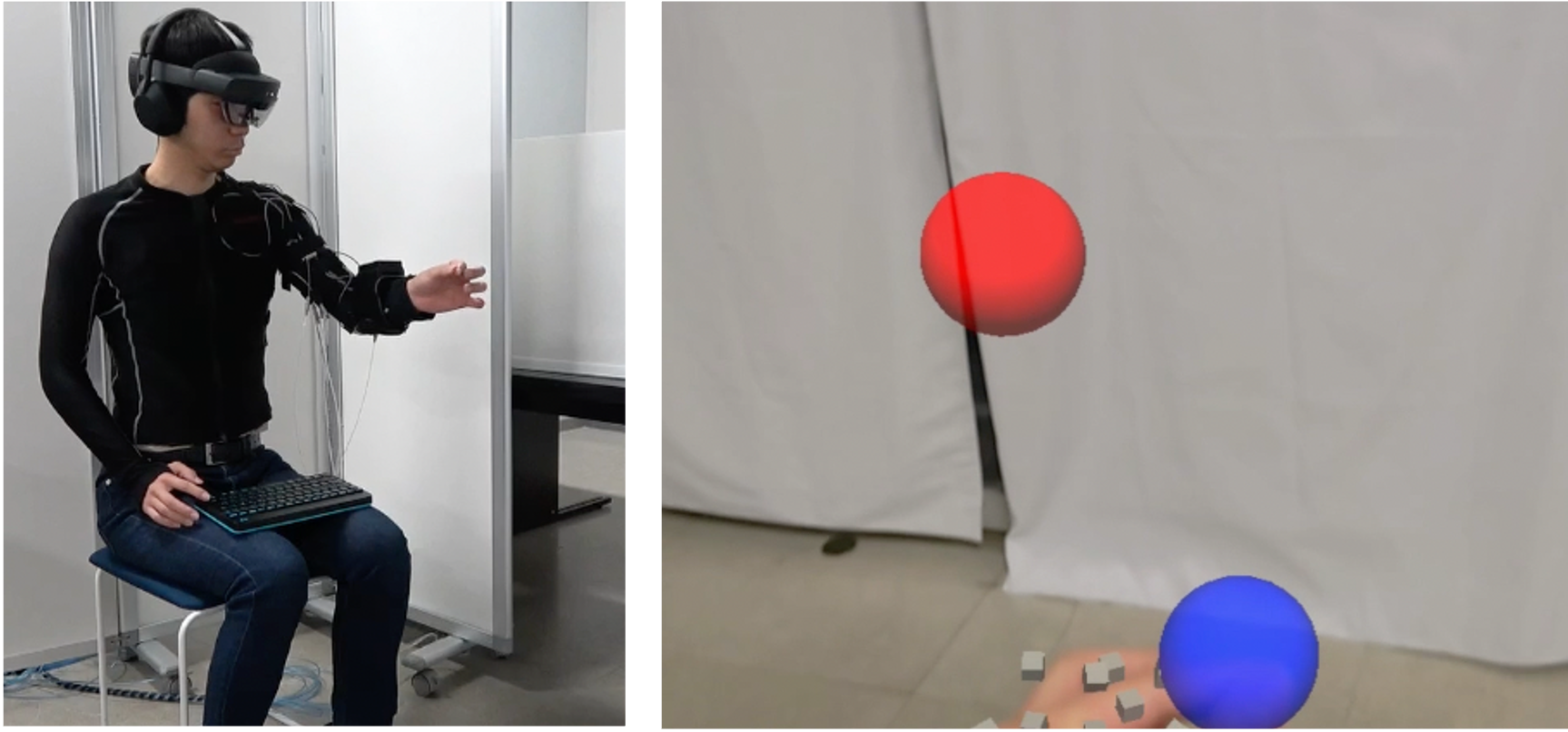
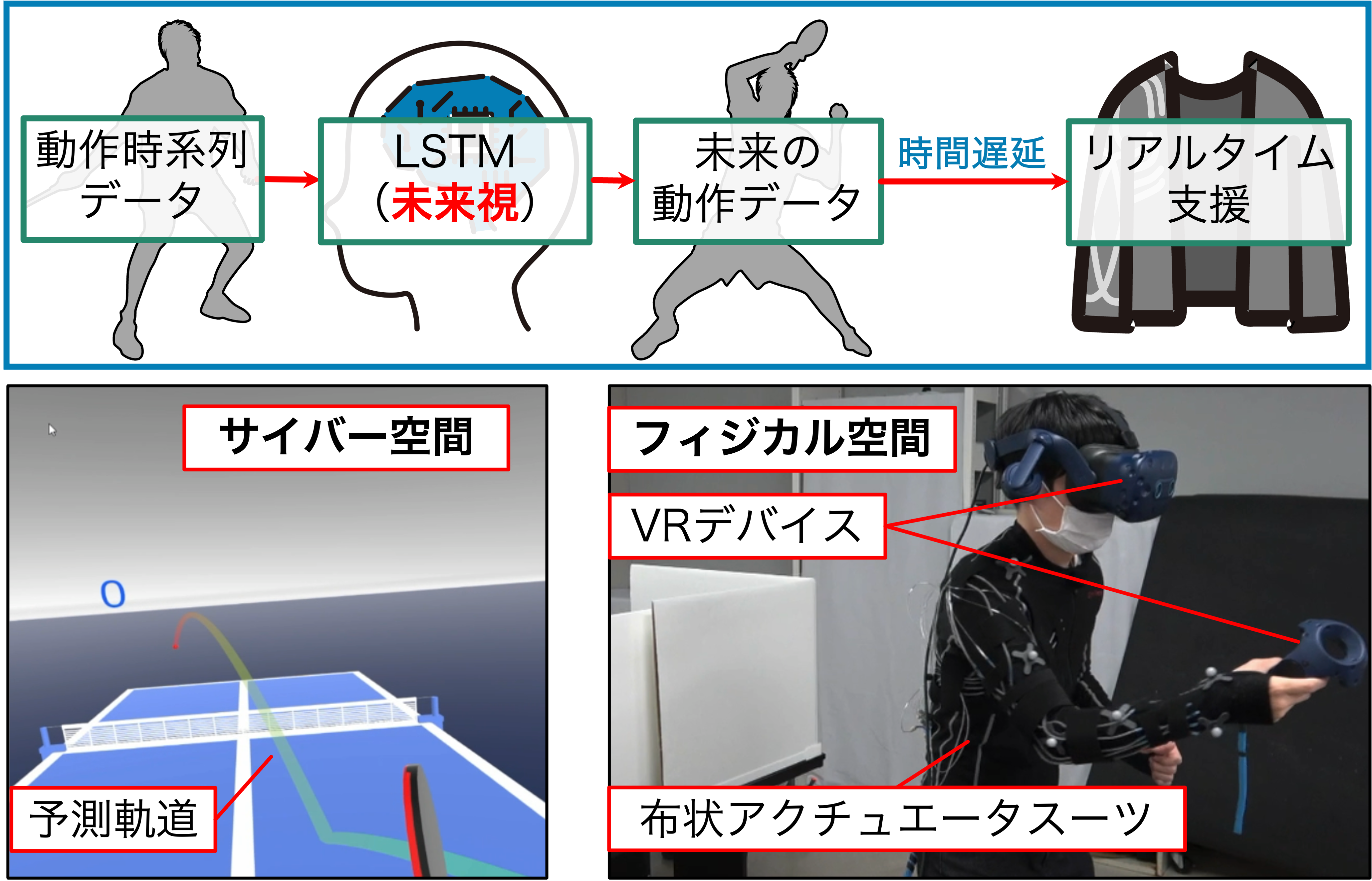
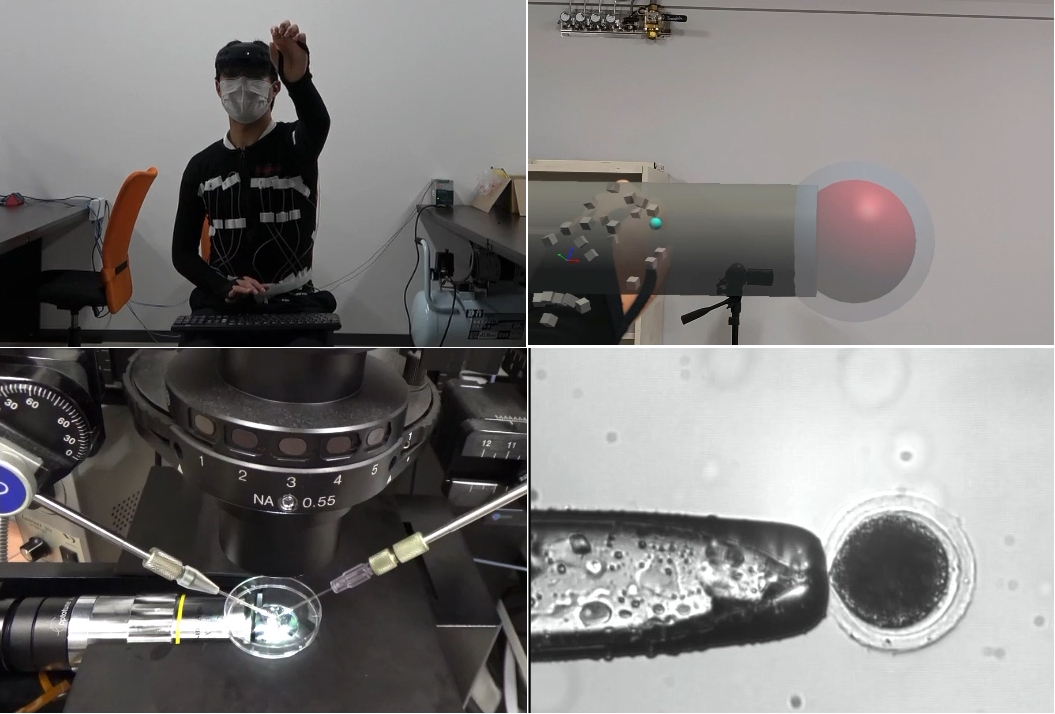
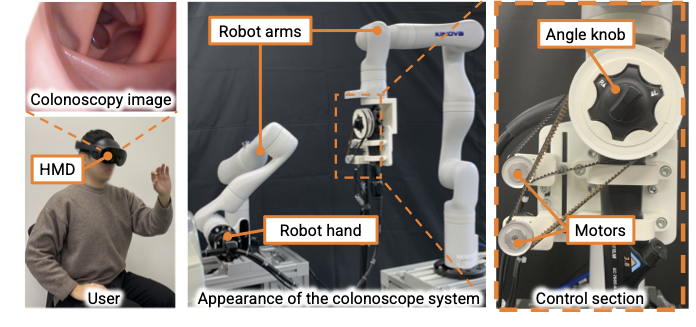
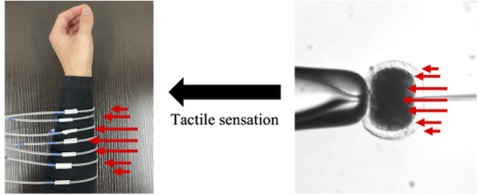
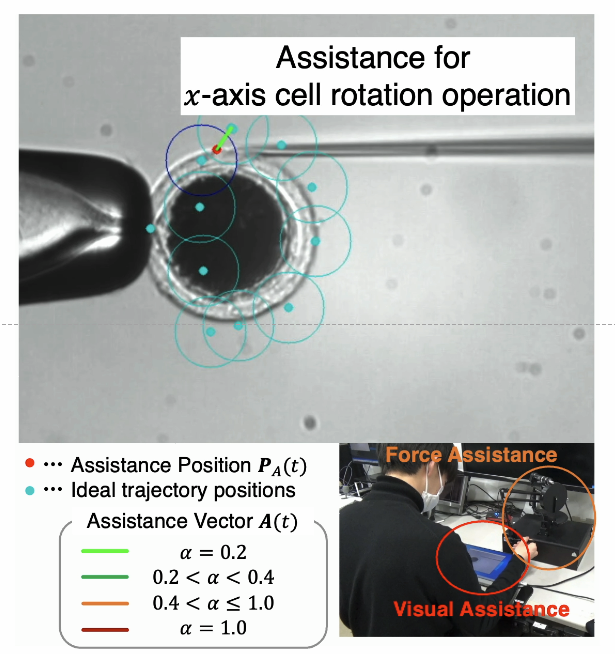
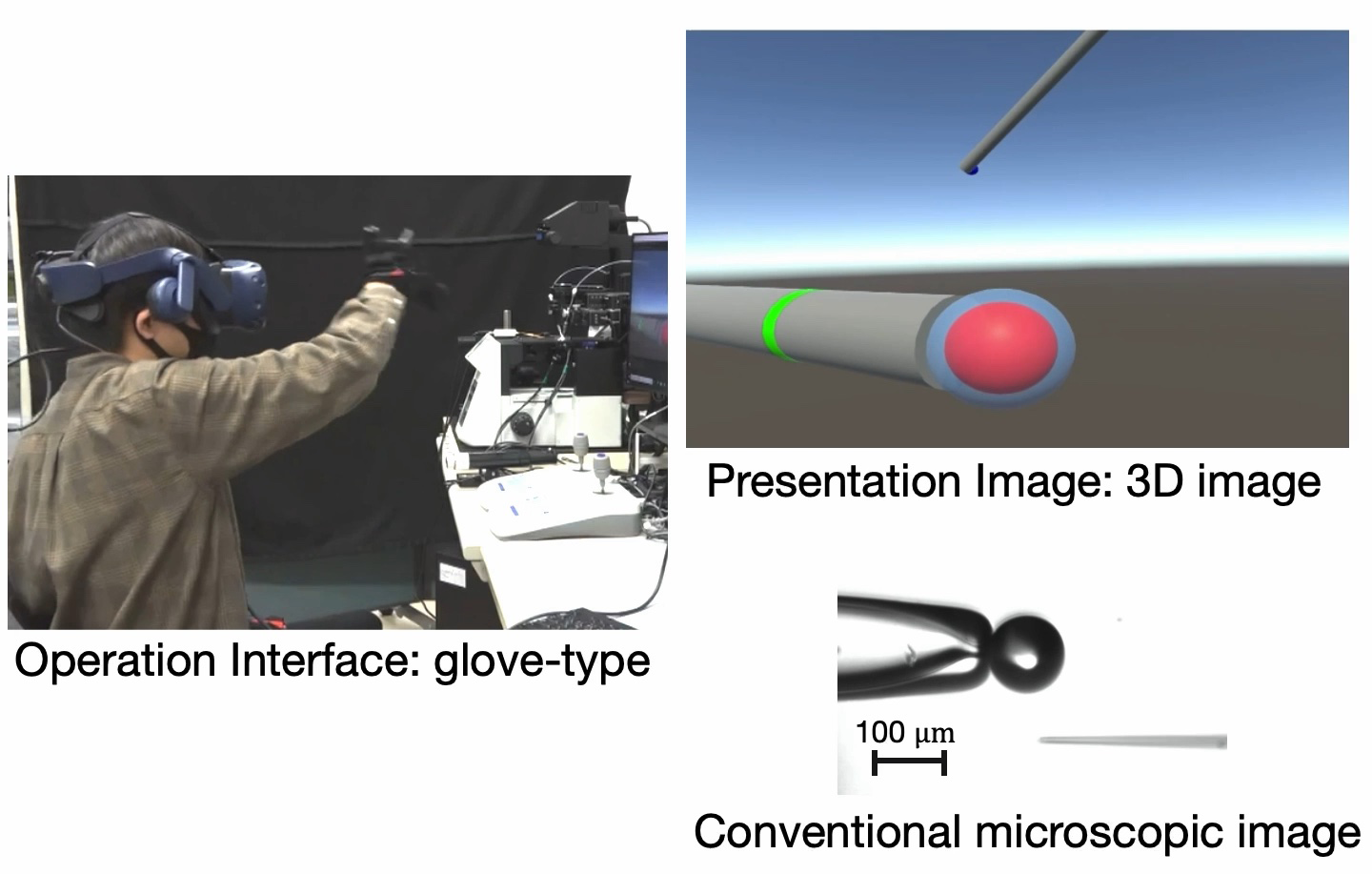
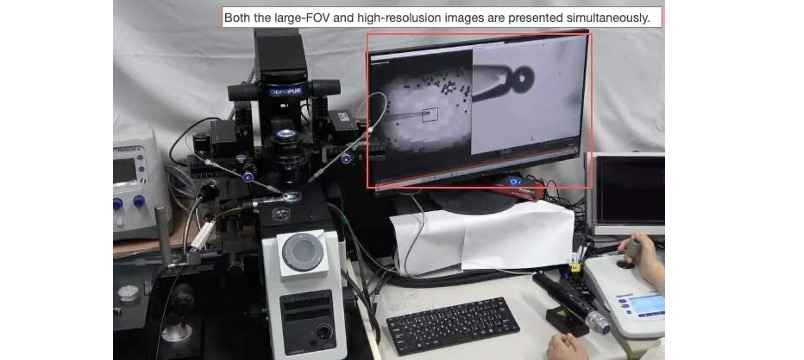
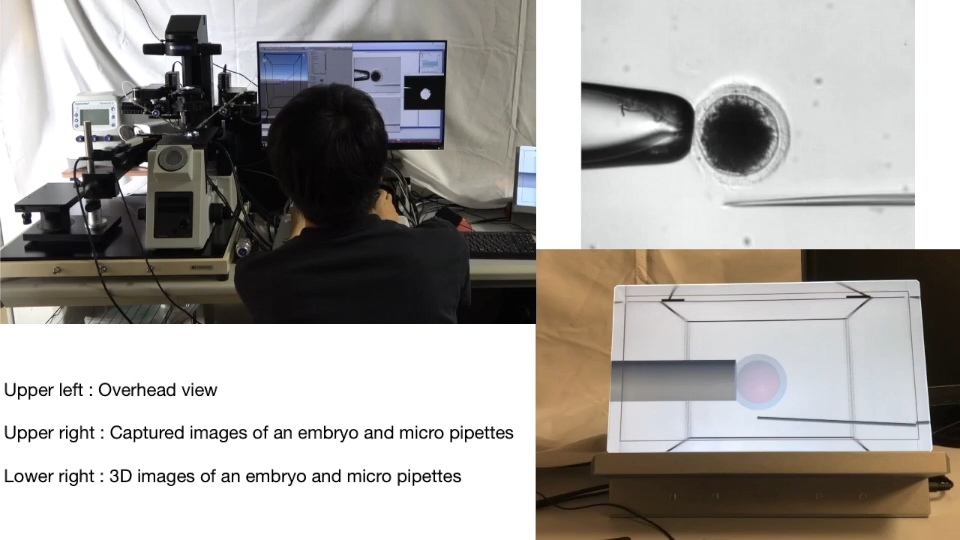
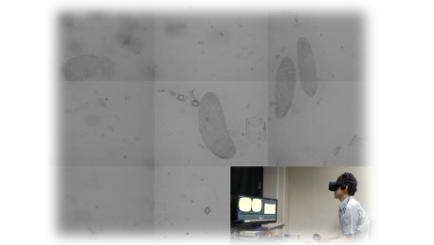
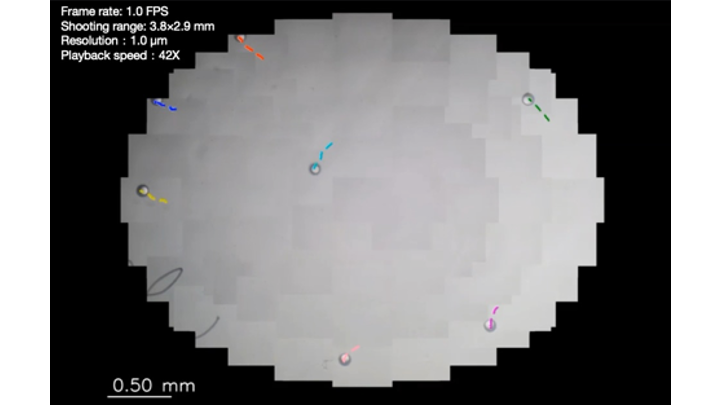
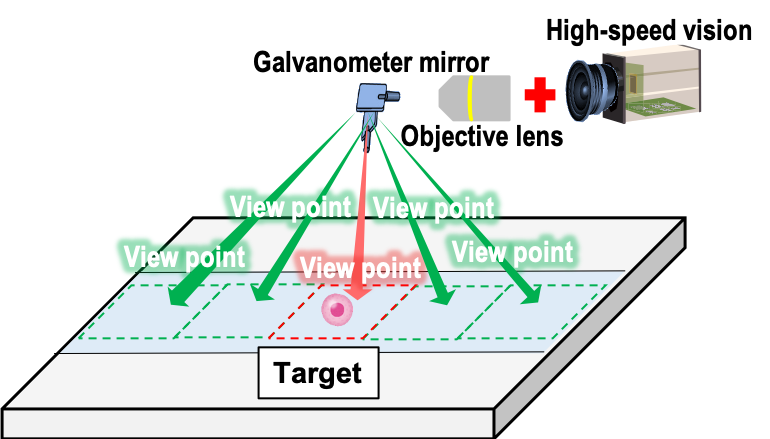
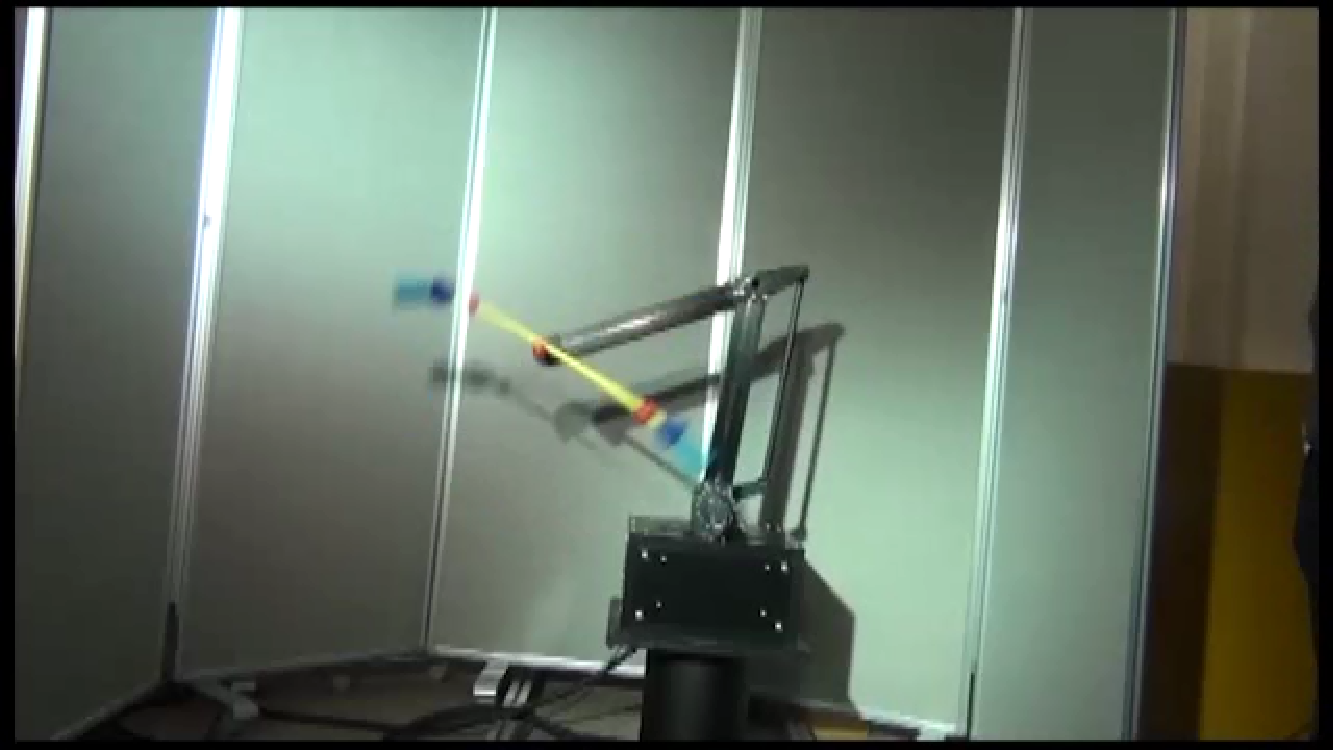
RESEARCH Automatic Field-of-View Adjustment for a View-Expansive Microscope via LSTM-Based Gaze and Pipette Motion Interpretation Visualizing Ambiguity in Semantic Segmentation for Polar-Body Detection Intuitive Hand Positional Guidance Using Fabric Robotic Suits Sports Coaching Using Predictive Vision AI and Fabric-Based Robotic Suits Fabric Robotic Suit for Torso Movement Guidance Immersive Colonoscopy System Microinjection Support System with Surface Tactile Sensation AI Robots for Assisting with Precision Manipulation Cell Manipulation System with Haptic Device Immersive micro-manipulation systems Micro-manipulation system for simultaneous display of wide-area and high-resolution images Real-time 3D image presentation system for micro-manipulation Image presentation interface for micro-manipulation Autonomous motion analysis of self-driven droplet using view-expansive microscope Microscopic Tracking System using View-expansive Microscope Robotic Juggling ‹ 1 ›